
Autonome Fahrzeuge verlassen sich auf Sensoren wie Kamera, Radar und Lidar. Doch äußere Bedingungen können ihre Funktion stark einschränken. Besonders in Deutschland, wo Wetterverhältnisse oft wechseln, sind diese Einflüsse kritisch. Hier sind die fünf wichtigsten Störfaktoren:
- Regen: Reflexionen und Verschmutzungen durch Sprühnebel beeinträchtigen die Sensoren.
- Schnee und Eis: Sichtverlust und unzuverlässige Daten durch reflektierende oder verdeckte Flächen.
- Nebel: Streuung von Licht und schlechte Sicht führen zu fehlerhaften Erkennungen.
- Hitze: Hohe Temperaturen setzen der Hardware zu, was zu Fehlfunktionen führen kann.
- Kälte und Temperaturschwankungen: Kondensation und abrupte Temperaturwechsel schädigen die Systeme.
Lösung: Fortschritte wie hydrophobe Beschichtungen, dynamische Kalibrierung und interne Sensorüberwachung helfen, diese Probleme zu minimieren. Dennoch bleibt die Kombination verschiedener Sensortypen entscheidend, da kein einzelner Sensor alle Bedingungen meistert.
Die Fähigkeit, fehlerhafte Daten zu erkennen und entsprechend zu reagieren, ist der Schlüssel für die Sicherheit autonomer Fahrzeuge.
1. Regen und Staunässe
In Deutschland gehört Regen zu den größten Herausforderungen für KI-gestützte Fahrzeugsensoren. Die Lichtpulse von Lidar-Sensoren werden durch Regentropfen gestreut, Radarsignale abgeschwächt, und die Sensordaten enthalten oft Rauschen – all das verringert die Erkennungsreichweite. Zusätzlich reflektieren nasse Straßen wie Spiegel und führen zu sogenannten Ghosting-Effekten. Dabei werden Reflexionen von Ampeln, Schildern oder Fahrzeugen fälschlicherweise als Objekte erkannt. Ein weiteres Problem ist der Sprühnebel auf Autobahnen, der aus Wasser, Öl und Streusalz besteht. Dieser Nebel verschmutzt die Sensoren und beeinträchtigt die Funktion oft mehr als der Regen selbst.
Ein Beispiel für die Erforschung solcher Probleme ist das vom Bundesministerium geförderte Projekt „AULA-KI“ an der Otto-von-Guericke-Universität Magdeburg. Im Rahmen des Projekts testete das Team um Christoph Steup ein autonomes EasyMile EZ10-Shuttle, ausgestattet mit 8 Lidar-Sensoren und 2 Kameras, auf dem Galileo-Testfeld. Das System konnte zuverlässig erkennen, wenn Regen die Sensordaten störte, und führte bei starkem Niederschlag automatisch einen kontrollierten Stopp durch.
„Das System war im Zweifel lieber zu vorsichtig als zu riskant." – Christoph Steup, Projektleiter, Otto-von-Guericke-Universität Magdeburg
Die Testergebnisse zeigen, wie wichtig Technologien wie hydrophobe Nanobeschichtungen, aktive Reinigungssysteme und dynamische Sensorkalibrierung sind, um auch bei starkem Regen einen sicheren Betrieb zu gewährleisten. Während bei leichtem Regen die KI-Software Störungen ausgleichen kann, bleibt ein kontrollierter Stopp bei starkem Regen die sicherste Maßnahme. Diese Untersuchungen unterstreichen, wie entscheidend eine präzise Sensordatenerfassung ist – und das gilt nicht nur bei Regen, sondern auch bei anderen schwierigen Wetterbedingungen.
sbb-itb-d35113a
2. Schnee und Eis
Schnee beeinträchtigt sowohl die Sicht als auch die Funktion von Sensoren. Er streut die Lichtpulse von Lidar-Systemen und verschlechtert die Bildqualität von Kameras. Gleichzeitig können Fahrbahnmarkierungen unter einer Schneeschicht verschwinden, während vereiste Oberflächen Signale auf unvorhersehbare Weise reflektieren. Dadurch werden die Eingangsdaten für KI-Systeme schnell unzuverlässig. Solche Bedingungen machen fortschrittliche Prüfmechanismen unverzichtbar, besonders im Winterbetrieb.
Das AULA-KI-Projekt der Otto-von-Guericke-Universität Magdeburg hat hierfür einen Ansatz entwickelt: die „maschinelle Selbsteinschätzung“. Dieses Konzept hat sich bereits bei der Analyse von Regen als effektiv erwiesen. Dabei bewertet das System kontinuierlich die Qualität der eingehenden Daten.
Bei mäßigem Schneefall können moderne KI-Systeme Störungen teilweise durch spezielle Softwaremethoden kompensieren und den Betrieb fortsetzen. Fahrzeughersteller setzen dabei auf definierte Vertrauensschwellenwerte für die KI-Modelle. Wird die Datenqualität zu schlecht, löst das System automatisch einen sicheren Kontrollstopp aus – noch bevor fehlerhafte Daten zu falschen Entscheidungen führen können. Gerade in den wechselhaften Winterbedingungen in Deutschland ist dieses Prinzip von zentraler Bedeutung.
3. Nebel und schlechte Sicht
Neben Regen und Schnee ist Nebel ein weiterer Faktor, der die Funktion von KI-gestützten Sensoren erheblich beeinträchtigen kann. Die winzigen Wassertröpfchen in der Luft streuen das Licht, das von Lidar-Systemen ausgesendet wird, und verschlechtern die Bildqualität von Kameras – genau die beiden Sensortypen, auf die autonome Fahrzeuge besonders angewiesen sind. Das Ergebnis? Unzuverlässige Sensordaten, die es der KI erschweren, fundierte Entscheidungen zu treffen. Ähnlich wie bei Regen stellen nebelbedingte Störungen eine große Herausforderung dar.
Das eigentliche Problem liegt jedoch nicht nur in der eingeschränkten Sichtweite. Es wird kritisch, wenn das System nicht erkennt, dass seine Daten fehlerhaft sind. Wenn die KI verzerrte Sensordaten als korrekt interpretiert, können gefährliche Fehlentscheidungen die Folge sein.
Ein spannender Ansatz kommt vom AULA-KI-Projekt der Otto-von-Guericke-Universität Magdeburg. Das Team um Christoph Steup testete den autonomen EasyMile-EZ10-Shuttle unter realen Nebelbedingungen auf dem Galileo-Testfeld der Universität. Dabei zeigte das System eine bemerkenswerte Fähigkeit: Es erkannte die durch Nebel verursachten Sensorstörungen zuverlässig und führte bei starker Beeinträchtigung automatisch einen kontrollierten Stopp durch – anstatt mit fehlerhaften Daten weiterzufahren. Dieses Vorgehen ist besonders relevant für Regionen in Deutschland, wie die Flusstäler von Rhein, Elbe oder Donau, wo im Herbst und Winter dichter Nebel häufig auftritt. Die Ergebnisse zeigen, wie wichtig es ist, auch bei schlechter Sicht präzise Daten sicherzustellen.
„Das System war im Zweifel lieber zu vorsichtig als zu riskant." – Christoph Steup, Projektleiter, Otto-von-Guericke-Universität Magdeburg
4. Hitze und direkte Sonneneinstrahlung
Die heißen Sommer in Deutschland, bei denen die Temperaturen oft über 35 °C steigen, setzen Sensoren und Steuergeräte unter enorme Belastung. Extreme Hitze und direkte Sonneneinstrahlung können die Funktionsfähigkeit von Steuergeräten (ECUs) und Recheneinheiten (CCUs) beeinträchtigen, was die Zuverlässigkeit von KI-Entscheidungen negativ beeinflusst.
„Künstliche Intelligenz kann nur so zuverlässig sein wie die Qualität ihrer Daten und die Robustheit ihrer Hardware." – Tong Wu, Market Manager, Sensirion
Um diesen Herausforderungen zu begegnen, kommen spezielle Temperatur- und Feuchtigkeitssensoren zum Einsatz. Diese überwachen in Echtzeit den thermischen Zustand der ECUs und Sensormodule. Sobald kritische Schwellenwerte überschritten werden, aktivieren sie automatisch Notfallprotokolle.
Ein weiterer wichtiger Aspekt ist der Energieverbrauch. Studien prognostizieren, dass der Anteil KI-spezifischer Hardware am gesamten Energieverbrauch von 14 % im Jahr 2023 auf 47 % im Jahr 2030 ansteigen wird. Durch eine optimierte Hardware und eine durchdachte Sensorintegration lassen sich sowohl die thermischen Belastungen als auch der Energieverbrauch reduzieren.
5. Kälte und Temperaturschwankungen
Während hohe Temperaturen die Hardware belasten, stellen kalte Bedingungen und plötzliche Temperaturschwankungen eine ganz eigene Herausforderung dar. Besonders kritisch wird es, wenn Fahrzeuge von frostigen Außentemperaturen in beheizte Räume, wie Garagen, gebracht werden. Dieser abrupte Wechsel kann Kondensation in ECUs und Sensormodulen verursachen. Gelangt Feuchtigkeit in die Komponenten, drohen dauerhafte Schäden an Bauteilen und Batteriesystemen. Solche Szenarien erfordern gezielte Systemreaktionen, wie das folgende Beispiel zeigt.
Winterliche Bedingungen bringen zudem oft Fehlinterpretationen in den Sensordaten mit sich. Schneeflocken können zum Beispiel fälschlicherweise als Hindernisse erkannt werden. Diese Problematik wird durch abrupte Temperaturwechsel noch verschärft, da sie die KI mit unsicheren Eingaben konfrontieren. Genau hier setzt das AULA-KI-Projekt der Otto-von-Guericke-Universität Magdeburg an. Unter der Leitung von Dr. Christoph Steup testete ein Team von 2023 bis Februar 2026 ein KI-System auf einem autonomen Shuttle des Typs EasyMile EZ10. Dieses Fahrzeug war mit acht LiDAR-Sensoren und zwei Kameras ausgestattet. Die Tests fanden auf dem Galileo-Testfeld im Magdeburger Hafen statt und zeigten, dass die KI in der Lage war, temperaturbedingte Störungen in den Sensordaten zuverlässig zu erkennen. Sobald die Daten unbrauchbar wurden, leitete das System einen kontrollierten Nothalt ein. Das Projekt erhielt rund 953.000 € Förderung vom Bundesministerium für Bildung und Forschung (BMBF) und Unterstützung vom Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVI.
„Ein autonomes Fahrzeug muss wissen, wann es seinen eigenen Sensoren noch vertrauen kann und wann nicht." – Dr. Christoph Steup, Projektleiter, Otto-von-Guericke-Universität Magdeburg
Für die praktische Anwendung bedeutet dies, dass KI-Systeme klare Schwellenwerte für Datenunsicherheit benötigen, wie sie auch in der KI-gestützten Schadensbewertung zum Einsatz kommen. Überschreitet die Streuung der Messwerte einen festgelegten Grenzwert – etwa durch abrupte Temperaturabfälle –, schaltet das Fahrzeug automatisch in einen sicheren Zustand. Zusätzlich erkennen interne Feuchtigkeits- und Temperatursensoren in den Sensorgehäusen Kondensation frühzeitig. So können Wartungsmaßnahmen eingeleitet werden, bevor ein Systemausfall eintritt.
„Autonomes Fahren wird nur dann breite Akzeptanz finden, wenn es auch unter schwierigen Bedingungen verlässlich sicher bleibt." – Dr. Christoph Steup, Projektleiter, Otto-von-Guericke-Universität Magdeburg
Sensorleistung nach Wetterbedingung: Übersichtstabelle
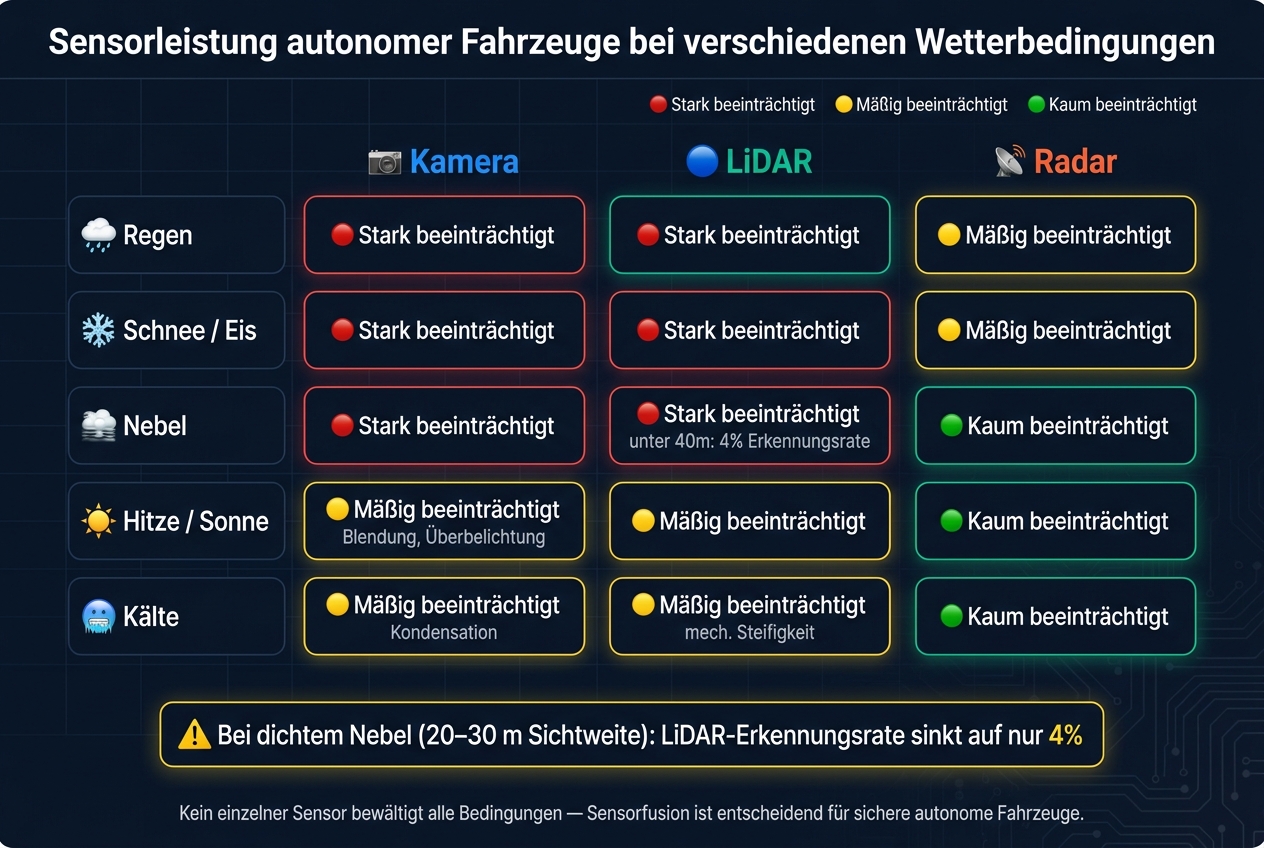
Sensorleistung bei Wetterbedingungen: Kamera vs. LiDAR vs. Radar
Kamera, LiDAR und Radar zeigen je nach Wetterlage unterschiedliche Leistungsprofile. Daten aus 2025 bestätigen frühere Erkenntnisse und verdeutlichen eine deutliche Leistungsminderung unter schwierigen Bedingungen. Dabei wurden Kontrast als entscheidender Faktor für Kameras und Signalintensität als Schlüsselmetrik für LiDAR-Sensoren identifiziert. Ein Beispiel: Bei dichtem Nebel mit einer Sichtweite von 20 bis 30 Metern sinkt die Objekterkennungsrate eines LiDAR-Sensors für ein Fahrzeug in 19 Metern Entfernung auf lediglich 4 % (0,04). Radar bleibt unter denselben Bedingungen nahezu unbeeinträchtigt, was die Bedeutung einer multimodalen Sensornutzung unterstreicht. Die folgende Tabelle fasst die Herausforderungen und möglichen Lösungen für jede Wetterbedingung zusammen.
"Perception and sensing for autonomous driving under adverse weather conditions have been the problem that keeps autonomous vehicles (AVs) from going to higher autonomy for a long time." – Yuxiao Zhang et al.
| Wetterbedingung | Sensortyp | Hauptproblem für die KI | Gegenmaßnahme |
|---|---|---|---|
| Regen | Kamera | Kontrastverlust; Linsenblockierung durch Tropfen | Bildverbesserung; hydrophobe Beschichtungen |
| Regen | LiDAR | Signalabschwächung; Rückstreuungsrauschen | Multi-Echo-Verarbeitung; Sensorfusion |
| Regen | Radar | Geringfügige Signalabschwächung bei Starkregen | Standard-Signalverarbeitung |
| Schnee/Eis | Kamera | Sichtblockierung; Verlust von Fahrbahnmarkierungen | Thermische Heizung; Deep-Learning-Erkennung |
| Schnee/Eis | LiDAR | Feuchtigkeitsablagerung; Signalverlust | Reinigungsmechanismen; Sensorfusion mit Radar |
| Schnee/Eis | Radar | Reichweiten- und Genauigkeitsverlust bei dicker Eisschicht | Signalverarbeitung zur Blockierungskompensation |
| Nebel | Kamera | Starker Kontrastverlust; verschwommene Merkmale | Tiefe multimodale Sensorfusion |
| Nebel | LiDAR | Intensitätsabfall; Detektionsversagen unter 40 m Sichtweite | LiDAR mit 1.550-nm-Wellenlänge; V2X-Daten |
| Nebel | Radar | Kaum beeinträchtigt; robust bei kleinen Wasserpartikeln | Primärsensor für Tiefenerkennung bei Sichteinschränkung |
| Hitze/Sonne | Kamera | Blendung; Überbelichtung; thermisches Rauschen | Optische Filter; HDR-Bildgebung |
| Hitze/Sonne | LiDAR | Interferenz durch solares Umgebungsrauschen | Temperaturkompensierte Kalibrierung |
| Hitze/Sonne | Radar | Kaum beeinträchtigt | - |
| Kälte | Kamera | Kondensation auf der Linse; verzögerte Reaktionszeiten | Interne Heizungen; klimakontrolliertes Gehäuse |
| Kälte | LiDAR | Mechanische Steifigkeit bei rotierenden Komponenten | Klimakontrolliertes Sensorgehäuse |
| Kälte | Radar | Kaum beeinträchtigt | - |
Die Tabelle zeigt, wie sich die Stärken der verschiedenen Sensoren gegenseitig ergänzen, was den Nutzen ihrer Kombination in autonomen Systemen verdeutlicht.
Fazit
Umwelteinflüsse wirken sich unterschiedlich auf KI-Sensoren aus – die Übersicht zeigt klar, dass kein einzelner Sensortyp alle Bedingungen zuverlässig bewältigen kann. Deshalb ist die Kombination verschiedener Sensoren in integrierten Systemen unverzichtbar.
Dabei wird deutlich, dass Sensoren weit mehr sind als reine Datensammler. Entscheidend ist, dass ein KI-System in der Lage ist, zu erkennen, wann die gelieferten Daten nicht mehr zuverlässig sind – ein Prinzip, das sich durch alle analysierten Wetterbedingungen zieht.
Für Fahrzeughalter und Flottenbetreiber wird schnell klar: Die Gesundheit der Sensoren ist eine zentrale Sicherheitsfrage. Subtile Probleme wie Kondensation, Kalibrierungsfehler oder Signalverluste bleiben oft unbemerkt. Hier kommt professionelle Expertise ins Spiel. Unsichtbare Einflüsse wie interne Kondensation zeigen, warum die CUBEE Sachverständigen AG schnelle und präzise Fahrzeuginspektionen anbietet – digital und deutschlandweit. Mit einem besonderen Fokus auf die Sensorintegrität moderner, KI-gestützter Fahrzeuge sorgt das Unternehmen für Sicherheit und Verlässlichkeit.
FAQs
Woran erkennt ein autonomes Auto, dass Sensordaten unzuverlässig sind?
Ein autonomes Fahrzeug kann unzuverlässige Sensordaten identifizieren, indem spezielle Überwachungssysteme eine Verschlechterung der Sensorleistung erkennen. Dies passiert häufig bei schwierigen Wetterbedingungen wie Regen, Nebel oder Schnee, da diese die Präzision der Sensorsignale beeinträchtigen können.
Welche Sensoren funktionieren bei Nebel am besten?
Radarsensoren sind bei Nebel besonders verlässlich. Selbst bei eingeschränkter Sicht liefern sie präzise Messdaten. Im Vergleich dazu haben Kameras und Lidarsensoren mit deutlichen Leistungseinbußen zu kämpfen, wenn Nebel die Sicht beeinträchtigt.
Wie kann ich Kondensation an Fahrzeugsensoren verhindern?
Um Kondensation zu vermeiden, sollten Sie die Sensoren regelmäßig auf Feuchtigkeit überprüfen und sicherstellen, dass sie ordnungsgemäß abgedichtet sind. Schutzgehäuse oder Abdeckungen können dabei helfen, Temperaturschwankungen und Feuchtigkeitseinflüsse zu reduzieren. Bei extremen Wetterbedingungen ist es ratsam, das Fahrzeug in einer Garage oder unter einem Carport abzustellen. Falls nötig, trocknen und reinigen Sie die betroffenen Sensoren, um deren einwandfreie Funktion zu gewährleisten.